基于limelight 3A的摄像头追踪
1.拆解任务 开始进行这次任务的同学想必已经完成了基于底盘(odometry
相比于只使用底盘来进行锁定,limelight摄像头对于追踪的tag的更换更加方便和灵活,因此这种方式优于底盘驱动的锁定。
所以如何实现这个锁定呢?
我们可以把它拆成几步:
好了,其实这个就是这么简单,就让我们开始吧。
2.Limelight的基本代码与使用方式 要完成任务,我们需要了解如何从limelight中获取数据。
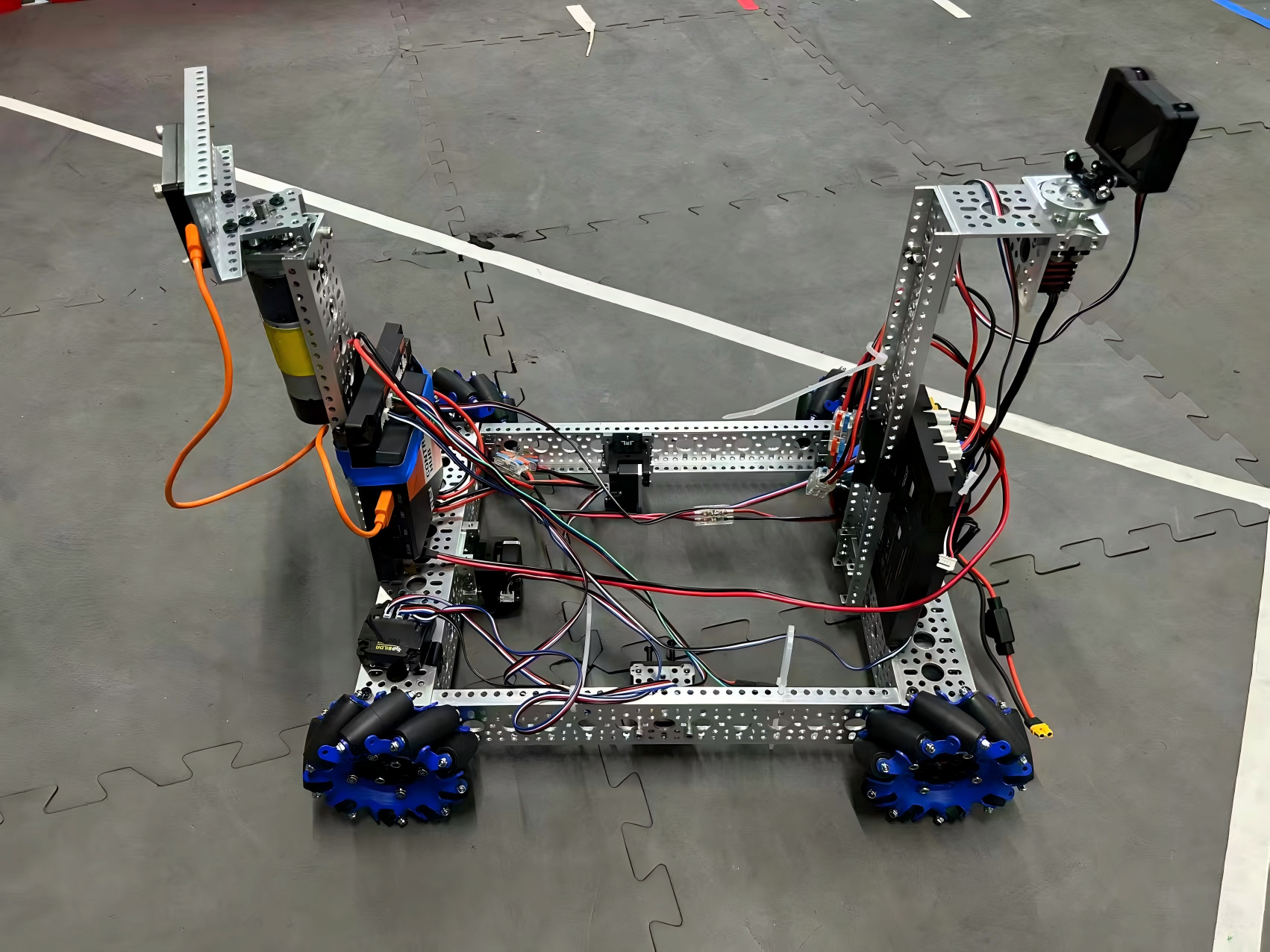
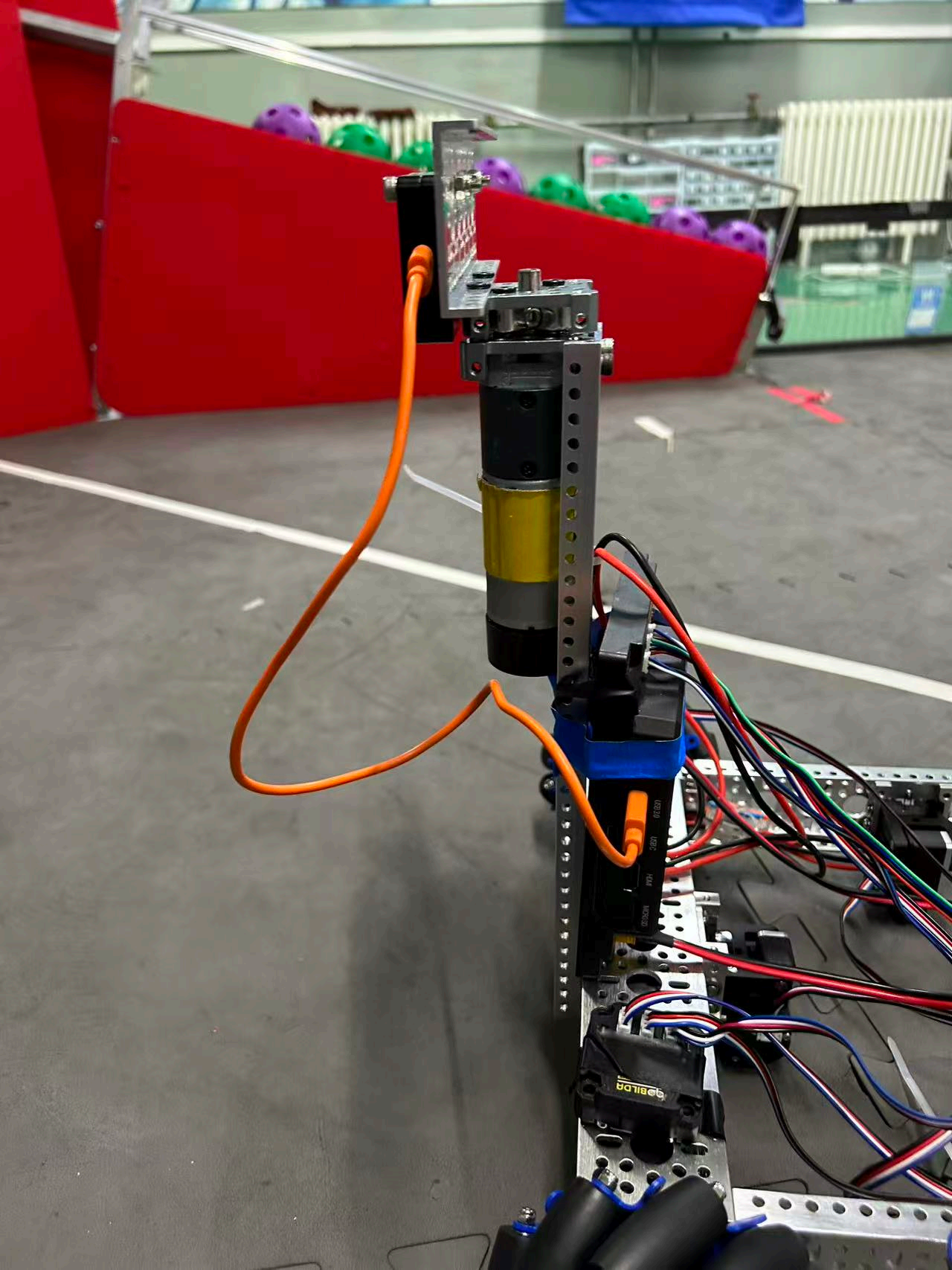
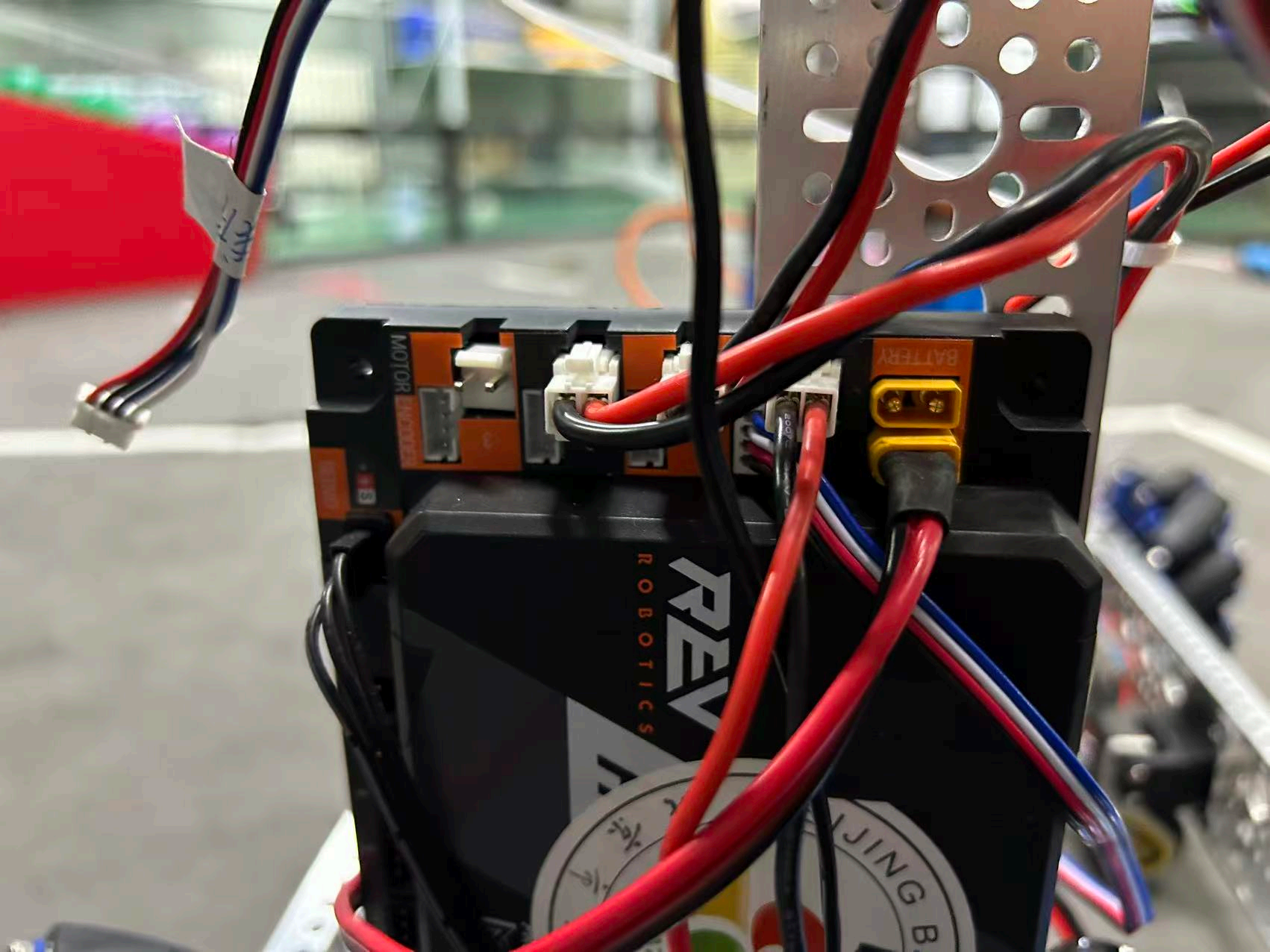
2.0 limelight与电机的链接 固定好limelight摄像头后,使用一根BtoC 线连接Limelight 的C口与Controll 的任意一个USB口。
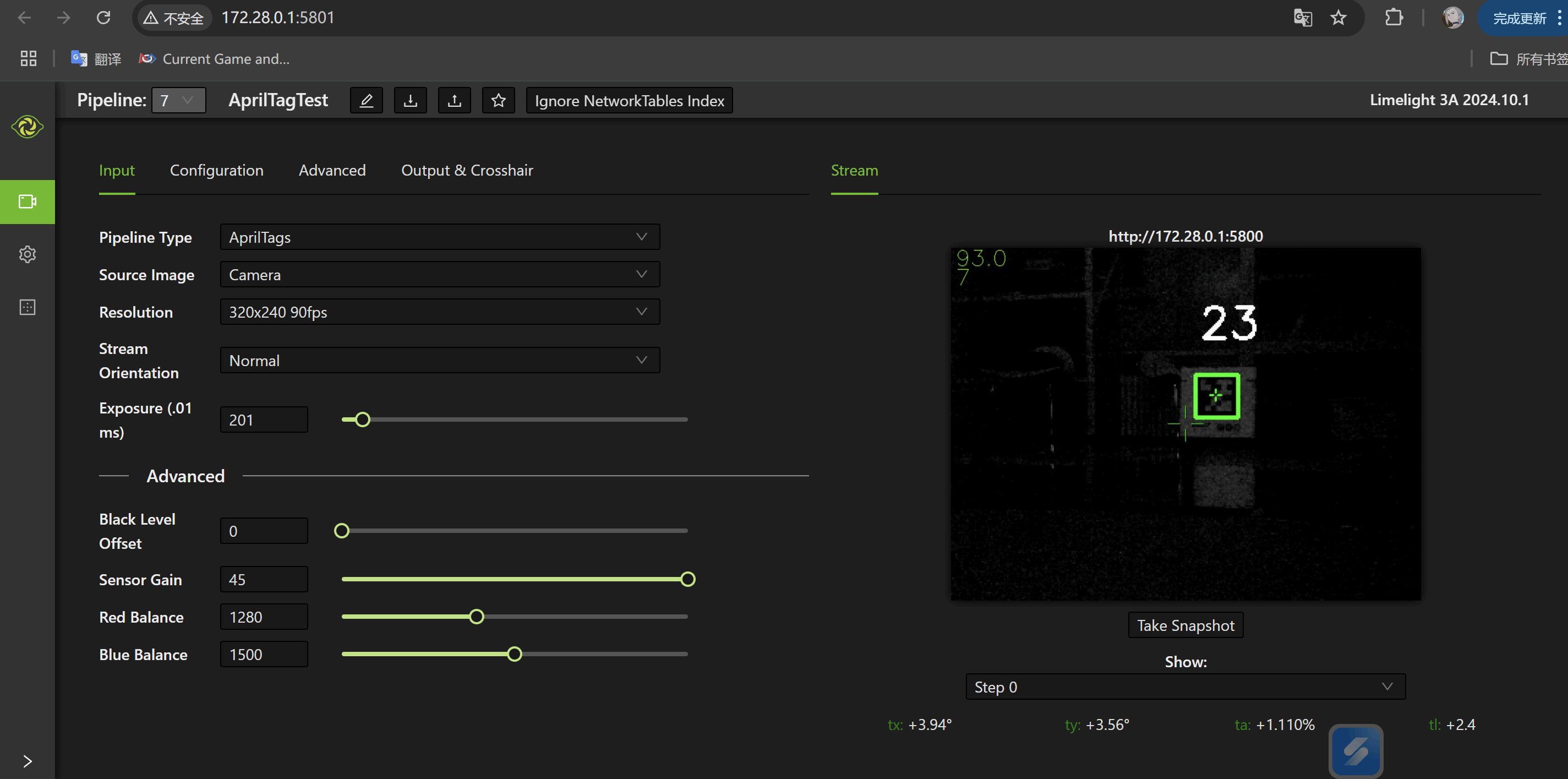
2.1 limelight的硬件 现在你可以开始设置limelight的硬件了!http://limelight.local:5801 网址,以设置你的limelight。
Input: Exposure(曝光度)
Input: Resolution(分辨率)
这一项最好设置一个能看的分辨率以及尽量高的帧数,用来提高识别到april
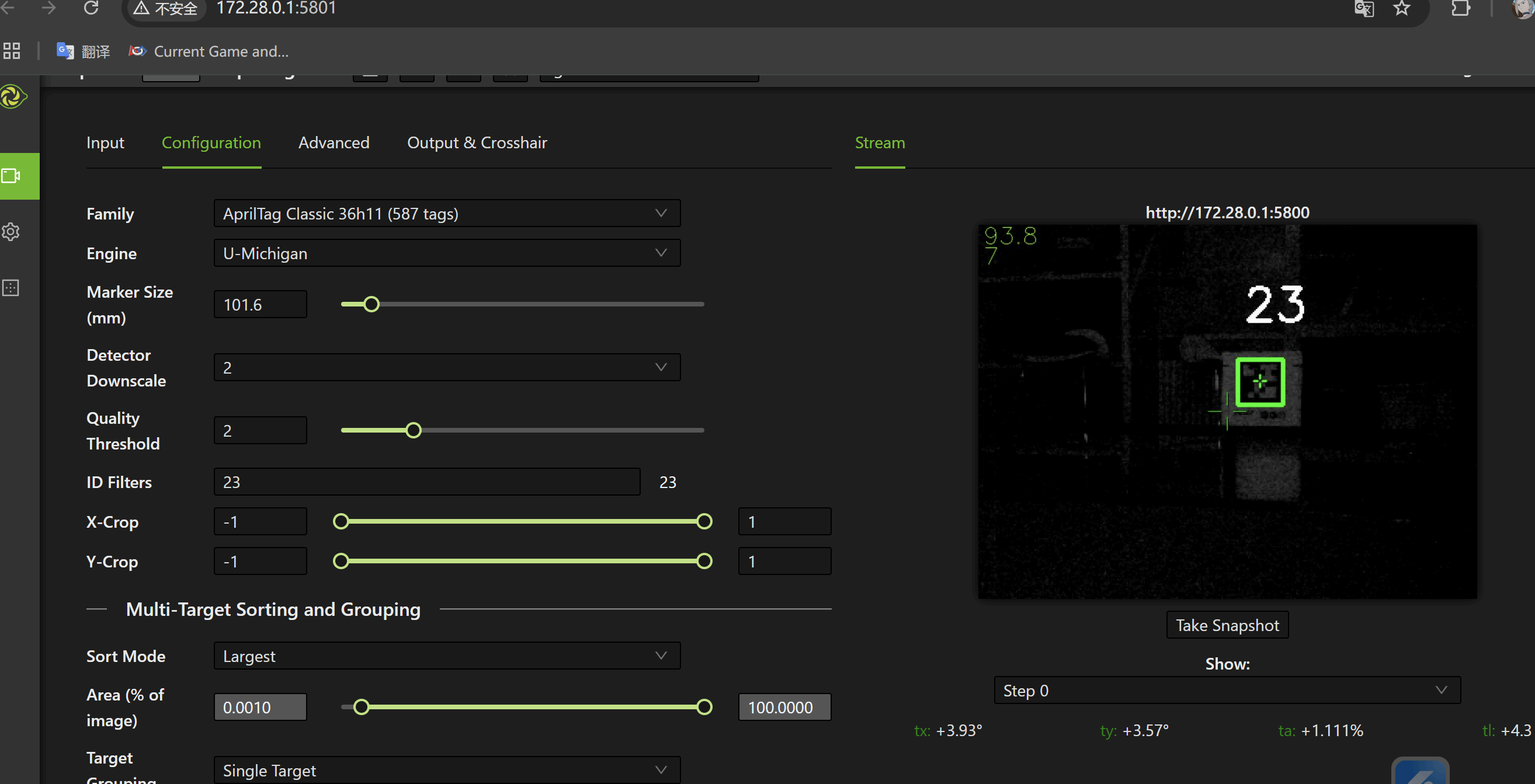
Configuration: ID filters(ID过滤器 注意这里是白名单 )
这一项是用来过滤你想要锁定的april tag
最后不要忘记按一下左上角的星星保存pipeline
2.2 limelight在AS上的数据读取 首先我们在AS上调用的话就需要获取摄像头的硬件并为他们进行初始化。这与普通硬件的初始化是一样的。
1 2 DcMotorEx cameraMotor = hardwareMap.get(DcMotorEx.class, "cameraMotor" );Limelight3A limelight = hardwareMap.get(Limelight3A.class, "camera1" );
在成功获取硬件道路之后我们可以为其进行更进一步的初始化,包括切换管道,以及开启limelight摄像头。
1 2 limelight.pipelineSwitch(7 ); limelight.start();
在为他们完成初始化之后就可以通过limelight
在官网上,他们为摄像头配备了很多语句以及他们的用途:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 List<FiducialResult> fiducials = result.getFiducialResults(); for (FiducialResult fiducial : fiducials) { int id = fiducial.getFiducialId(); double x = detection.getTargetXDegrees(); double y = detection.getTargetYDegrees(); double StrafeDistance_3D = fiducial.getRobotPoseTargetSpace().getY(); telemetry.addData("基准标记 " + id, "距离 " + distance + " 米" ); } fiducial.getRobotPoseTargetSpace(); fiducial.getCameraPoseTargetSpace(); fiducial.getRobotPoseFieldSpace(); fiducial.getTargetPoseCameraSpace(); fiducial.getTargetPoseRobotSpace();
官网地址
1 fiducial.getTargetXDegrees();
因为我们几乎只需要使用这句话来对我们想要锁定的目标的横向的偏移量进行测量。
1 2 3 LLResult result = limelight.getLatestResult();if (result != null && result.isValid() && !result.getFiducialResults().isEmpty()) { for (LLResultTypes.FiducialResult tag : result.getFiducialResults()) {
同时我们对于fiducial ID
1 double txRaw = tag.getTargetXDegrees();
如果需要驱动telemetry来进行调试,也可以调用
1 2 3 4 telemetry.addData("TagID" , tag.getFiducialId()); telemetry.addData("txRaw" , txRaw); telemetry.addData("txFiltered" , txFiltered); telemetry.addData("ty" , tag.getTargetYDegrees());
至于为什么fiducals是一个数组,是因为原本limelight是为了同时识别很多个目标 做的,因此会得到很多组数据 。而我们只需要锁定一个 数据并且已经在硬件层面进行过过滤 了所以并不需要担心循环中出现其他的tag,直接在循环内执行代码就行。
需要注意的是,这些语句只能针对fiducals数组中的元素 才能调用,当针对整个数组时是无法调用的。
还需要注意的是tx给出的返回值是一个角度(角度制) 。
3.如何驱动电机 得到来自摄像头的对于april codedouble deadband = 7.0;来确保摄像头不会过于敏感。这个死区大概位于5-10度之间是较为合适的。如果没有死区或者死区太小会导致摄像头(电机)的摆动,因此需要死区来限制最小调整范围以确保摆动被尽可能限制。
1 2 3 4 double kP = 0.01 ; double power = kP * txFiltered;power = Math.max(-0.15 , Math.min(0.15 , power)); cameraMotor.setPower(power);
接下来,你会发现如果不给摄像头设置一个默认值(当april
1 2 cameraMotor.setPower(0 ); telemetry.addLine("Aligned (within deadband)" );
把这两个合起来长这样:
1 2 3 4 5 6 7 8 9 10 11 double deadband = 7.0 ;if (Math.abs(txFiltered) > deadband) { double kP = 0.01 ; double power = kP * txFiltered; power = Math.max(-0.15 , Math.min(0.15 , power)); cameraMotor.setPower(power); telemetry.addData("MotorPower" , power); } else { cameraMotor.setPower(0 ); telemetry.addLine("Aligned (within deadband)" ); }
这样子就完成了对于tx的大致处理,你的摄像头已经可以大概对准你设定的april
如果想要更加稳定的摄像头,或者彻底消除初步代码带来的波动,请移步高斯滤波 。
当然,你会问另一个问题,”如果我的摄像头没有在一开始就对准april code
1 2 3 4 LLResult result = limelight.getLatestResult();if (result != null && result.isValid() && !result.getFiducialResults().isEmpty()) { for (LLResultTypes.FiducialResult tag : result.getFiducialResults()) { double txRaw = tag.getTargetXDegrees();
这一部分中的if()即可判断摄像头在这一刻是否检测到了数据,如果有,那么可以进入上面的部分进行追踪,如果没有,就可以进入哨戒状态,通过慢速的,不断的旋转电机 来在车体周围寻找目标。
1 2 double lostPower = 0.13 ; cameraMotor.setPower(lostPower);
更优的哨戒模式 可以在这里查看。
到这里,恭喜你,你就完成了通过摄像头返回的tx值来驱动电机锁定目标的大致框架。剩下的工作就只剩下了调试和优化你写出来的框架以及接入麦轮底盘代码进行遥控测试。
4.调试和优化 4.1高斯滤波 4.2丢失目标寻找(哨戒模式)优化 很好,相信到这里你的大部分代码已经写完了,现在我们来解决车体在旋转时丢失目标后如何优化寻找效率。当然对于普通的移动丢失目标也适用。通过记录最后一次看到目标tag的tx来确定目标是从左边消失的还是从右边消失的,进而来确定电机应该往哪个方向旋转。
实现思路是这样的:lastTx。注意,对于这个变量,tx值的内容并不重要,重要的是tx值的正负。其实完全可以使用bool类型来做变量但是我为了调试方便还是选择了double
1 2 3 4 5 6 7 8 9 private Double lastTx = null ; @Override public void runOpMode () throws InterruptedException { while (opModeIsActive()) { LLResult result = limelight.getLatestResult(); if (result != null && result.isValid() && !result.getFiducialResults().isEmpty()) { for (LLResultTypes.FiducialResult tag : result.getFiducialResults()) { lastTx = txRaw;
然后,在进入哨戒模式时,检测这个lastTx,判断其的正负,来确定电机旋转的方向。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 else { if (lastTx != null ) { double lostPower = 0.13 ; if (lastTx > 0 ) { cameraMotor.setPower(lostPower); } else { cameraMotor.setPower(-lostPower); } } else { cameraMotor.setPower(0.15 ); } }
在找到aprillastTx。
5.完整代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 package org.firstinspires.ftc.teamcode;import com.qualcomm.hardware.limelightvision.LLResult;import com.qualcomm.hardware.limelightvision.Limelight3A;import com.qualcomm.hardware.limelightvision.LLResultTypes;import com.qualcomm.robotcore.eventloop.opmode.LinearOpMode;import com.qualcomm.robotcore.eventloop.opmode.TeleOp;import com.qualcomm.robotcore.hardware.DcMotorEx;import com.qualcomm.robotcore.hardware.DcMotorSimple;import java.util.LinkedList;import java.util.Queue;@TeleOp(name = "Limelighttest1112") public class limelight1112 extends LinearOpMode { private Limelight3A limelight; private static final int WINDOW_SIZE = 6 ; private final Queue<Double> txHistory = new LinkedList <>(); private Double lastTx = null ; int lostcount = 0 ; private final double [] gaussianKernel = {0.06136 , 0.24477 , 0.38774 , 0.24477 , 0.06136 }; private double previousTxFiltered = 0 ; @Override public void runOpMode () throws InterruptedException { DcMotorEx cameraMotor = hardwareMap.get(DcMotorEx.class, "cameraMotor" ); cameraMotor.setMode(DcMotorEx.RunMode.RUN_WITHOUT_ENCODER); limelight = hardwareMap.get(Limelight3A.class, "camera1" ); telemetry.setMsTransmissionInterval(11 ); limelight.pipelineSwitch(7 ); limelight.start(); DcMotorEx frontLeftMotor = hardwareMap.get(DcMotorEx.class,"leftFrontMotor" ); DcMotorEx backLeftMotor = hardwareMap.get(DcMotorEx.class,"leftBackMotor" ); DcMotorEx frontRightMotor = hardwareMap.get(DcMotorEx.class,"rightFrontMotor" ); DcMotorEx backRightMotor = hardwareMap.get(DcMotorEx.class,"rightBackMotor" ); frontRightMotor.setDirection(DcMotorSimple.Direction.REVERSE); backRightMotor.setDirection(DcMotorSimple.Direction.REVERSE); waitForStart(); int notfound = 0 ; while (opModeIsActive()) { LLResult result = limelight.getLatestResult(); if (result != null && result.isValid() && !result.getFiducialResults().isEmpty()) { for (LLResultTypes.FiducialResult tag : result.getFiducialResults()) { double txRaw = tag.getTargetXDegrees(); lastTx = txRaw; if (txHistory.size() >= WINDOW_SIZE) txHistory.poll(); txHistory.add(txRaw); double txFiltered = applyGaussianFilter(); txFiltered = applyLowPassFilter(txFiltered); double deadband = 7.0 ; if (Math.abs(txFiltered) > deadband) { double kP = 0.01 ; double power = kP * txFiltered; power = Math.max(-0.15 , Math.min(0.15 , power)); cameraMotor.setPower(power); telemetry.addData("MotorPower" , power); } else { cameraMotor.setPower(0 ); telemetry.addLine("Aligned (within deadband)" ); } telemetry.addData("TagID" , tag.getFiducialId()); telemetry.addData("txRaw" , txRaw); telemetry.addData("txFiltered" , txFiltered); telemetry.addData("ty" , tag.getTargetYDegrees()); } } else { if (lastTx != null ) { double lostPower = 0.13 ; if (lastTx > 0 ) { cameraMotor.setPower(lostPower); } else { cameraMotor.setPower(-lostPower); } } else { cameraMotor.setPower(0.15 ); } } telemetry.update(); double y = -gamepad1.left_stick_y; double x = gamepad1.left_stick_x * 1.1 ; double rx = gamepad1.right_stick_x; double denominator = Math.max(Math.abs(y) + Math.abs(x) + Math.abs(rx), 1 ); double frontLeftPower = (y + x + rx) / denominator; double backLeftPower = (y - x + rx) / denominator; double frontRightPower = (y - x - rx) / denominator; double backRightPower = (y + x - rx) / denominator; double powerCoefficent= 0.6 ; frontLeftMotor.setPower(frontLeftPower*powerCoefficent); backLeftMotor.setPower(backLeftPower*powerCoefficent); frontRightMotor.setPower(frontRightPower*powerCoefficent); backRightMotor.setPower(backRightPower*powerCoefficent); } } private double applyGaussianFilter () { if (txHistory.isEmpty()) return 0.0 ; Double[] values = txHistory.toArray(new Double [0 ]); int size = values.length; double sum = 0 ; for (int i = 0 ; i < size; i++) { int kernelIndex = gaussianKernel.length - size + i; if (kernelIndex < 0 ) kernelIndex = 0 ; sum += values[i] * gaussianKernel[kernelIndex]; } return sum; } private double applyLowPassFilter (double currentTxFiltered) { double alpha = 0.1 ; double filtered = alpha * currentTxFiltered + (1 - alpha) * previousTxFiltered; previousTxFiltered = filtered; return filtered; } }
神秘生物图鉴
作者:忻鹿 Sep 28, 2025