Intake车教程 1. 任务拆解 这个intake的手动程序涉及的硬件有两个舵机和一个电机,也就是说我们会接触到一个新的硬件servo。
2. servo的基本控制方式 我们在本次任务中使用的goBuilda servo有两种模式,普通servo模式和连续旋转servo(crservo)模式。
两种servo模式对比
2.0 如何把普通舵机模式转变成连续旋转舵机模式 这个步骤叫做烧录固件,需要用到programmerhttps://docs.revrobotics.com/rev-crossover-products/servo/srs-programmer/switching-operating-modes
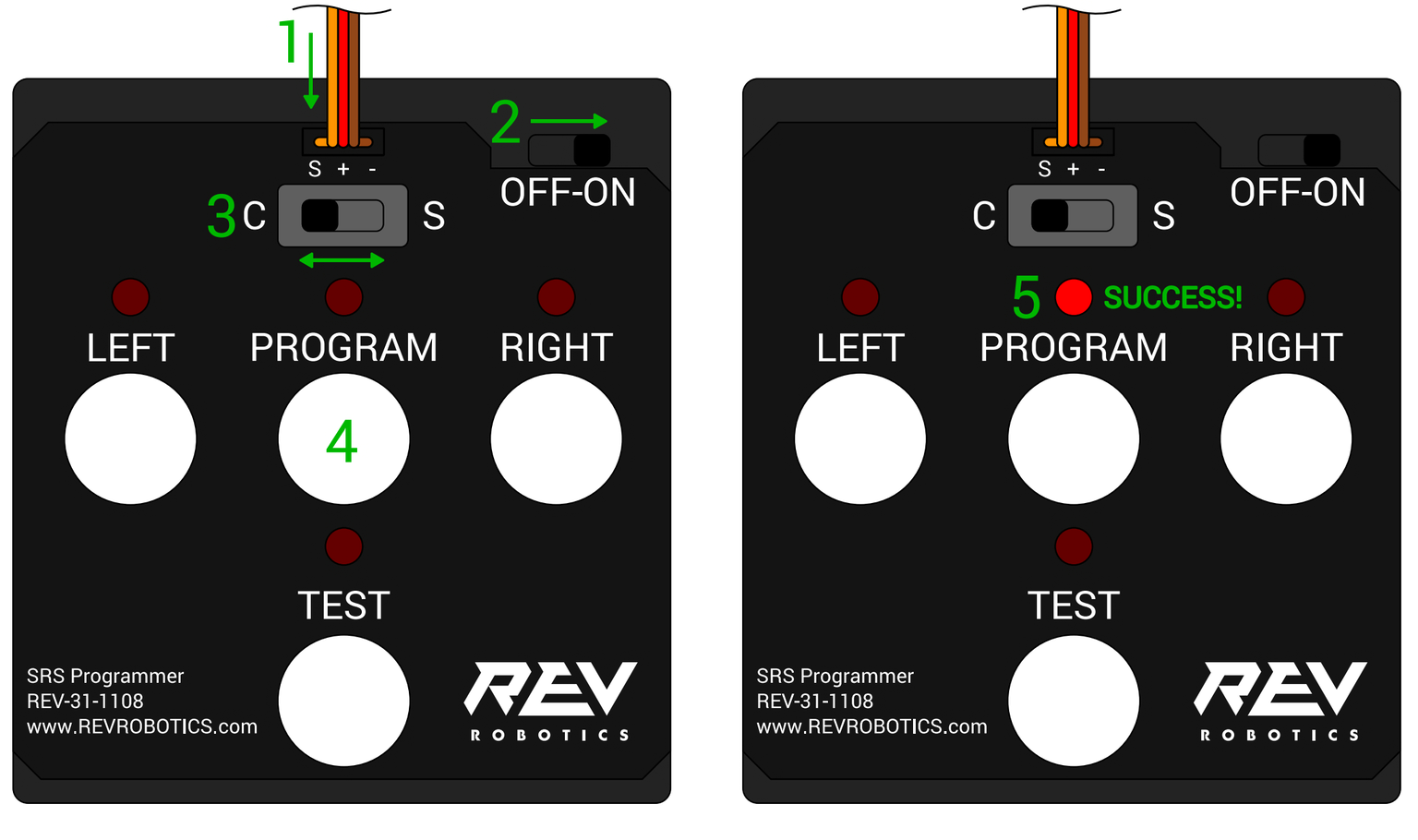
连接servo和programmer
使用原本连接舵机和hub的杜邦线,注意插线的方向,白线也就是通信线要在左侧S标志的位置。
烧录固件
把programmer的开关turn on,把模式开关滑到c(连续模式)。
测试
在cr或servo模式下,按下并释放TEST可以循环两种测试模式
2.1 servo控制的代码实现 就像前面所说的,我们用setPosition使舵机连续旋转
setPosition(1) - 舵机连续向前旋转
setPosition(0) - 舵机连续向后旋转
setPosition(0.5) - 舵机停止
2.1.0 一直连续旋转 1 2 intakeLeft.setPosition(1 ); intakeRight.setPosition(1 );
2.1.1 手柄控制旋转 1 2 3 4 5 6 7 8 9 10 11 12 13 if (gamepad1.right_bumper) { intakeMotor.setPower(motorInput); intakeLeft.setPosition(1 ); intakeRight.setPosition(1 ); } else if (gamepad1.left_bumper) { intakeMotor.setPower(-motorInput); intakeLeft.setPosition(0 ); intakeRight.setPosition(0 ); }else { intakeMotor.setVelocity(0 ); intakeLeft.setPosition(0.5 ); intakeRight.setPosition(0.5 ); }
3. 完整代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 package org.firstinspires.ftc.teamcode;import com.qualcomm.robotcore.eventloop.opmode.LinearOpMode;import com.qualcomm.robotcore.eventloop.opmode.TeleOp;import com.qualcomm.robotcore.hardware.DcMotorEx;import com.qualcomm.robotcore.hardware.DcMotorSimple;import com.qualcomm.robotcore.hardware.Servo;@TeleOp(name = "IntakeTest") public class IntakeTest extends LinearOpMode { private DcMotorEx intakeMotor; private Servo intakeLeft; private Servo intakeRight; @Override public void runOpMode () throws InterruptedException { DcMotorEx frontLeftMotor = hardwareMap.get(DcMotorEx.class,"leftFrontMotor" ); DcMotorEx backLeftMotor = hardwareMap.get(DcMotorEx.class,"leftBackMotor" ); DcMotorEx frontRightMotor = hardwareMap.get(DcMotorEx.class,"rightFrontMotor" ); DcMotorEx backRightMotor = hardwareMap.get(DcMotorEx.class,"rightBackMotor" ); frontLeftMotor.setDirection(DcMotorSimple.Direction.REVERSE); backLeftMotor.setDirection(DcMotorSimple.Direction.REVERSE); double motorInput = 1.0 ; intakeMotor = hardwareMap.get(DcMotorEx.class,"intakeMotor" ); intakeLeft = hardwareMap.get(Servo.class,"intakeLeft" ); intakeRight = hardwareMap.get(Servo.class,"intakeRight" ); intakeRight.setDirection(Servo.Direction.REVERSE); intakeLeft.setDirection(Servo.Direction.FORWARD); intakeMotor.setDirection(DcMotorSimple.Direction.FORWARD); waitForStart(); while (opModeIsActive()) { intakeMotor.setPower(motorInput); intakeLeft.setPosition(1 ); intakeRight.setPosition(1 ); double y = -gamepad1.left_stick_y; double x = gamepad1.left_stick_x * 1.1 ; double rx = gamepad1.right_stick_x; double denominator = Math.max(Math.abs(y) + Math.abs(x) + Math.abs(rx), 1 ); double frontLeftPower = (y + x + rx) / denominator; double backLeftPower = (y - x + rx) / denominator; double frontRightPower = (y - x - rx) / denominator; double backRightPower = (y + x - rx) / denominator; double powerCoefficient = 1.0 ; frontLeftMotor.setPower(frontLeftPower * powerCoefficient); backLeftMotor.setPower(backLeftPower * powerCoefficient); frontRightMotor.setPower(frontRightPower * powerCoefficient); backRightMotor.setPower(backRightPower * powerCoefficient); } } }