316

shot by Nikon Z6_2 in 2025.3.16
ISO 1000
32 mm
1 ev
f8
1/2000s
shot by Nikon Z6_2 in 2025.3.16
ISO 1000
32 mm
1 ev
f8
1/2000s
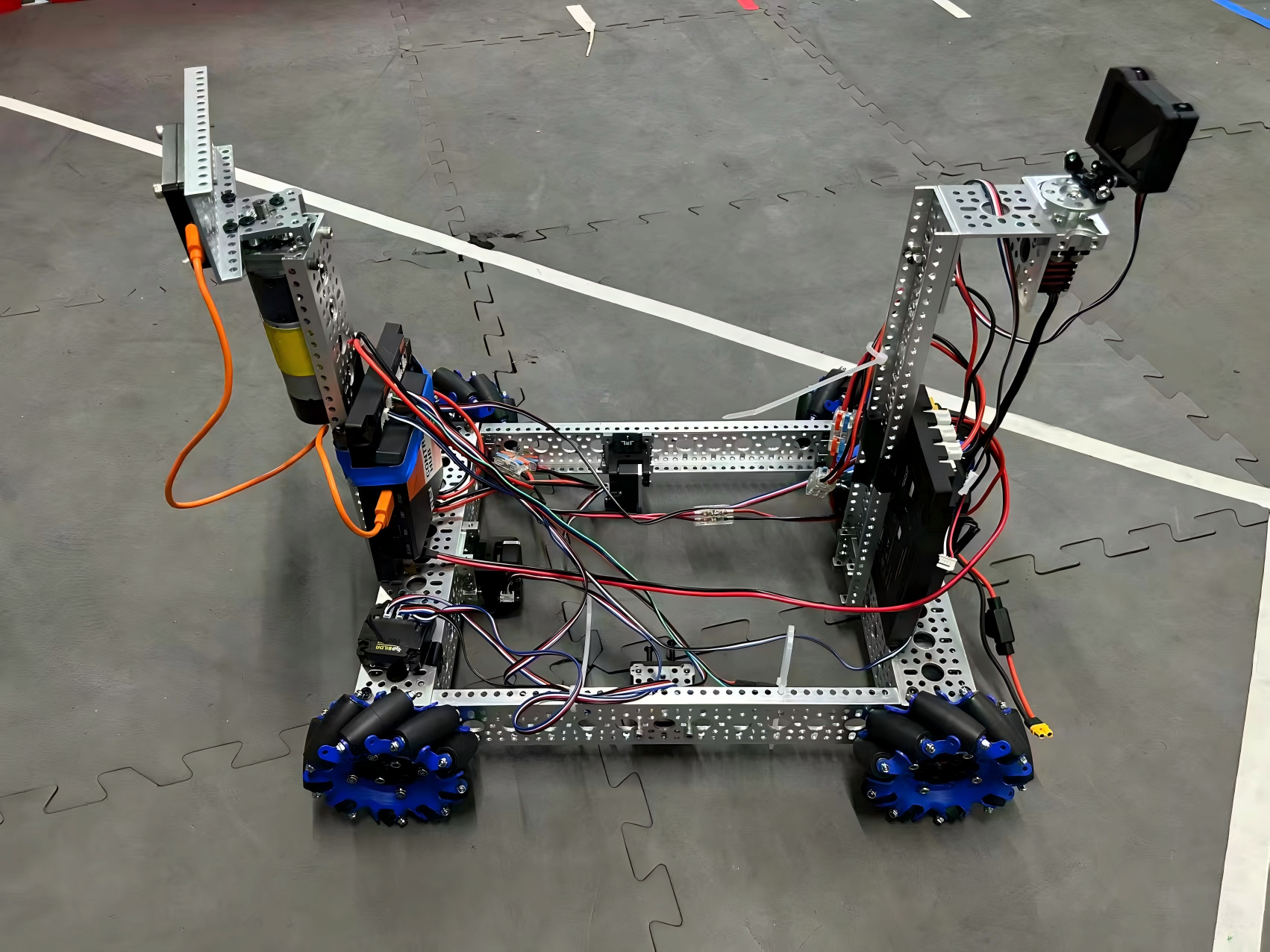
这个intake的手动程序涉及的硬件有两个舵机和一个电机,也就是说我们会接触到一个新的硬件servo。
在完成任务的过程中可能会遇到的主要问题就是servo的控制,所以本教程的重点就是控制servo。
我们在本次任务中使用的goBuilda servo有两种模式,普通servo模式和连续旋转servo(crservo)模式。
本程序中需要的模式是cr连续旋转模式。
两种servo模式对比
普通舵机模式:
在一个角度范围内 set to position,只能来回扫动无法连续旋转
连续旋转舵机模式:
也通过set to position 控制,但是可以连续旋转
首先可以大部分参考这个官方教程:
https://gm0.org/zh-cn/latest/docs/software/tutorials/mecanum-drive.html
下面我对官方教程做一些补充说明
简而言之,每个麦轮会有一个斜向的实际作用力,我们可以把它分解成竖直和水平方向的两个分力,并且通过力的合成实现不同移动。